
AXI Handshaking Rules
I’m going to try to keep this article short, while still answering the question: what is the bare minimum you need to know when using an AXI handshake?
We’ll start with the basics, there are masters and slaves. “Slave” ports are those that receive data, whereas “master” ports transmit or send data to slaves.
 |
I’ve tended to follow the convention found in Xilinx’s examples of prefixing
my master ports with M_*_ and my slave ports with S_*_. I’ll then
often fill in the * part of the middle with some name reminding me which
interface is being described. For example, S_VID_TVALID would be the
TVALID signal found on the slave video interface. The result is a signal
list, for AXI stream, looking something like that in Fig. 2 below.
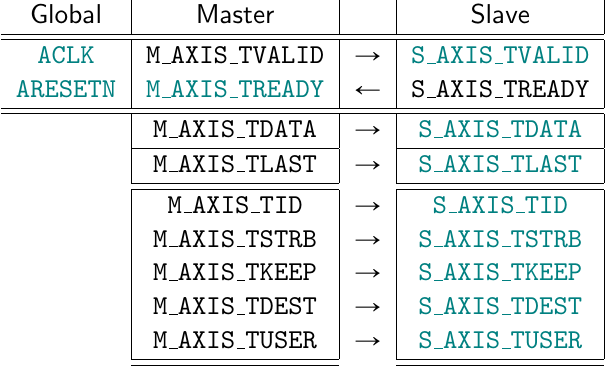 |
In most cases, only the clock, reset, valid, ready, and data signals are
required of an interface. In packet interfaces, or whenever using Xilinx’s
stream DMAs, the
TLAST signal is also required. Video interfaces also use the TUSER
signal to indicate a start of frame.
The rest of the signals are optional, and I’ve rarely found a use for them.
Today, however, I want to focus on the handshake signals. Therefore we’ll
group these signals into three categories: TVALID, TREADY, and we’ll
lump everything else into the signal TDATA. This is simply because the
handshaking signals create rules on all of the payload signals equally.
Further, while I will be discussing AXI stream handshakes today, all of our rules will also apply to AXI and AXI-lite handshakes as well. Indeed, some of the examples and illustrations I will be using further on come from non-stream designs.
The rules
So let’s start the basic handshaking rules. Indeed, I like to think of these as the bare minimum number you need to know in order to build an AXI handshake.
-
xVALIDmust be cleared following any reset. -
Nothing happens unless
xVALID && xREADY.Just as a point of notation here, I’m following the AXI4 specifications convention of using
xVALIDto refer to an AXI stream channel of some type. In this case, I might have saidM_AXIS_TVALID && M_AXIS_TREADYorS_AXIS_TVALID && S_AXIS_TREADY, but I’ve just shortened things with the abbreviation above to try to simplify things. -
Something always happens anytime
xVALID && xREADY– Be careful not to add any other conditions to this check lest you miss a handshake! -
Nothing can change unless
!xVALID || xREADY.This is more of a master rule than one for a slave, but still quite important. We’ll come back to this more in a moment.
-
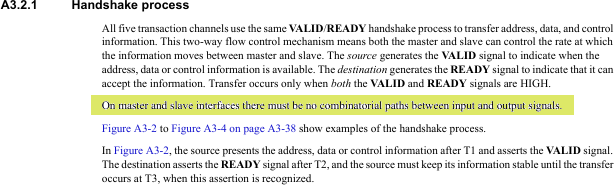
The
xREADYsignal must be registered. Use a skidbuffer if necessary to avoid any throughput impacts.Okay, this isn’t quite what’s required by the specification. Rather, this is a consequence of what the specification does require. The specification simply requires that, “On master and slave interfaces, there must be no combinatorial paths between input and output signals.”
 |
-
(Recommendation only:)
READYshould be held high when the design is idle, and only lowered (if required) followingVALID && READY.This works great for AXI streams. It even works well for the AXI read address channel. It’s just a bit harder to do with the write address and write data channels if you don’t have a skidbuffer available to you. We’ll discuss this problem more in a moment.
Example Slave logic
If all you do is follow those basic rules, you’ll pretty much be forced into some basic logic forms. Let’s look at the form of a slave logic handler, and then we’ll look at the master logic next.
Within a slave, therefore, you are likely to have logic blocks that look like the following:
always @(posedge ACLK)
// Logic to determine S_AXIS_TREADY
always @(posedge ACLK)
if (S_AXIS_TVALID && S_AXIS_TREADY) // plus nothing!
// Do somethingSome time ago, I wrote about the problem associated with adding conditions to the handshake check. Since that time, the worst problem I’ve seen with this handshake has been with AXI memory mapped slaves that can only handle a read or a write request at a given time, but never both. So let’s discuss how to handle that situation quickly.
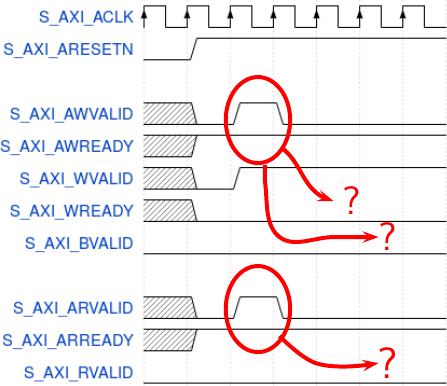
For example, this VHDL design is quite broken:
FSM:
process(STATE_cs, ...) -- not listing all items here
variable AW_VALID_ARVALID : std_logic_vector(1 downto 0);
begin
AWVALID_ARVVALID := S_AXI_AWVALID & S_AXI_ARVALID;
case STATE_cs is
when IDLE =>
-- Skipping irrelevant lines ...
S_AXI_AWREADY <= '1';
S_AXI_ARREADY <= '1';
-- ...
case AWVALID_ARVALID is
when "10" =>
-- ...
STATE_ns <= WRITE_ADDRESS;
when "01" =>
-- ...
STATE_ns <= WRITE_ADDRESS;
when others =>
-- ...
STATE_NS <= IDLE;
end case;
-- ...
end case;
end process FSM;
-- ...
SEQ_LOG:
process (S_AXI_ACLK) is
begin
if S_AXI_ACLK'event and S_AXI_ACLK = '1' then
if S_AXI_ARESETN = '0' then
STATE_cs <= IDLE;
-- ...
else
-- ...
STATE_cs <= STATE_ns;
end if;
end if;
end process;Notice, here, how the designer allowed both AWVALID && AWREADY and
ARVALID && ARREADY to be true at the same time. If ever the two were
both true at the same time, both of the bursts would be lost.
 |
My favorite approach to dealing with this situation is to use two combinatorial wires to control reading from the AW and AR skidbuffers respectively.
// Accept writes, but only if there are no pending reads
assign axil_write_ready = skid_awvalid && skid_wvalid
&& (!S_AXI_BVALID || S_AXI_BREADY)
&& !axil_read_ready;
assign axil_read_ready = skid_arvalid
&& (!S_AXI_RVALID || S_AXI_RREADY);This approach fits nicely into the framework we’ve already established in the Easy AXI-lite template.
This isn’t the only valid approach. Many Xilinx IP’s handle this situation by
quietly buffering the request that wasn’t accepted so that it can be handled
later. They then come back to this buffered request once they finish
handling the one they’ve chosen to handle and before raising xREADY again.
That’s how they handle it when it works.
Then there’s their AXI QUAD SPI IP design. This design tries to do something very similar, only … they weren’t consistent in how they built their logic. Hence, in this example, some of their logic prioritizes writes over reads.
rnw_cmb <= S_AXI4_ARVALID and (not S_AXI4_AWVALID);
-- ...
axi_length_cmb <= S_AXI4_ARLEN (when rnw_cmb = '1')
else
S_AXI4_AWLEN;But when you get to their actual state machine, they choose to process reads
before writes. First, though, here’s the wr_transaction signal that you’ll
see referenced by the state machine below.
wr_transaction <= S_AXI4_AWVALID and (S_AXI4_WVALID);Now that you know what `wr_transaction is, you can look inside their state machine to see how reads get prioritized over writes:
when IDLE =>
if (S_AXI4_ARVALID = '1') then
-- ...
elsif (wr_transaction = '1') then
-- ...
-- ...The result is that, if the IP ever gets both a read request and a write request at the same time, it will process and return the read request with the AXI burst parameters of the write request–such as the burst’s length, for example.
The point here is simple: If AWVALID && AWREADY or ARVALID && ARREADY
then a transaction has been accepted. If both are true, then you need to make
sure you are processing both transactions properly, or at least buffering one
for later processing.
Example Master logic
From the perspective of a master, the logic forms are just a touch different. In this case, I’m more set in my ways. Indeed, I’ve gotten to the point where I always use the following logic form for any AXI master handshake.
// OPT_LOWPOWER is a parameter telling me when to force unused signals
// to a known value, to reduce any unnecessary signal toggling within
// an FPGA.
parameter [0:0] OPT_LOWPOWER = 1'b0;
always @(posedge ACLK)
if (!ARESETN)
M_AXIS_TVALID <= 0;
else if (!M_AXIS_TVALID || M_AXIS_TREADY)
M_AXIS_TVALID <= next_valid_signal;
always @(posedge ACLK)
if (OPT_LOWPOWER && !ARESETN)
M_AXIS_TDATA <= 0;
else if (!M_AXIS_TVALID || M_AXIS_TREADY)
begin
M_AXIS_TDATA <= next_data;
if (OPT_LOWPOWER && !next_valid)
M_AXIS_TDATA <= 0;
endOf course, this assumes the existence of the (possibly combinatorial) signals
next_valid_signal and next_data. No, that doesn’t mean I’m a die hard
believer in two process state machines–but that’s another story for another
day.
I will say that most of the AXI handshaking bugs I come across in masters come from not following this form.
For example, you can find the following logic in Xilinx’s AXI stream master template design:
assign axis_tlast = (read_pointer == NUMBER_OF_ITEMS-1);
always @(posedge ACLK)
if (!ARESETN)
axis_tlast_delay <= 1'b0;
else
axis_tlast_delay <= axis_tlast;
assign M_AXIS_TLAST = axis_tlast_delay;See the bug? If not, check out Fig. 5 below.
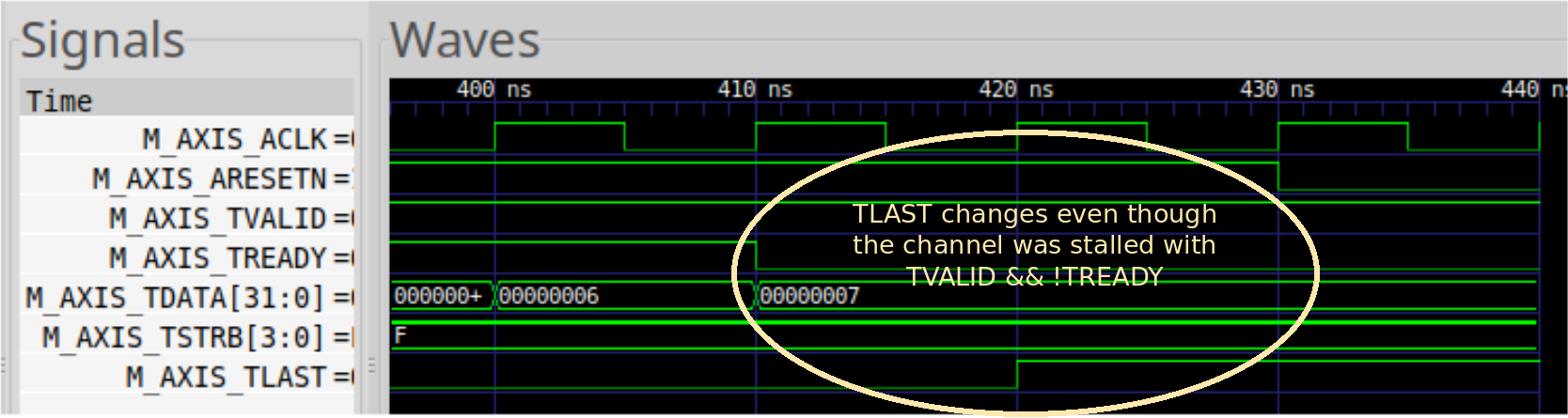 |
If M_AXIS_TVALID && !M_AXIS_TREADY on the penultimate beat of the burst,
M_AXIS_TLAST will get set while the channel is supposed to be stalled in
violation of the protocol. You might find yourself surprised later when the
data packet arrives with the wrong number of items in it.
These sorts of problems aren’t limited to AXI stream designs, nor are they limited to Xilinx’s templates. For example, here’s the same sort of bug in their AXI Ethernet-lite IP. Again, this bug is due to the fact that they didn’t follow the form above.
AXI4_RDATA_GEN : if (C_S_AXI_PROTOCOL = "AXI4") generate
AXI_READ_OUTPUT_P: process (S_AXI_ACLK) is
begin
if (S_AXI_ACLK'event and S_AXI_ACLK = '1') then
if (S_AXI_ARESETN=RST_ACTIVE) then
S_AXI_RDATA <= (others =>'0');
elsif S_AXI_RREADY = '1' then
S_AXI_RDATA <= IP2Bus_Data;
end if;
end if;
end process AXI_READ_OUTPUT_P;In this case, if S_AXI_RVALID and S_AXI_RREADY are both low, the requested
data will not be placed on the bus. Instead, the design will read the wrong
data from the IP on the first beat of any return burst.
If you simply follow the logic templates above, you won’t make this mistake.
Capturing the rules in formal properties
These basic handshaking rules are also really easy to capture in some simple formal properties.
For example, we can check whether or not TVALID is properly reset.
The first step to such a check is to assume the existence of an initial
reset. For this, we can use f_past_valid. This is simply a piece of helper
logic that I often create. It’s just something that is clear on the first
cycle, set on every other cycle, and only used during formal verification.
reg f_past_valid;
initial f_past_valid = 0;
always @(posedge ACLK)
f_past_valid <= 1;On that very first cycle, we can assume that the reset must be active.
always @(*)
if (!f_past_valid)
assume(!ARESETN);This is the only reset constraint required. Beware, though, the formal solver might toggle your reset line later when you aren’t expecting it.
We can also use f_past_valid to handle initial value checks. In particular,
if f_past_valid is clear then our TVALID logic should have any initial
value we’ve given to it–zero. Similarly, if the reset was active on the last
cycle the TVALID should also be low.
always @(posedge ACLK)
if (!f_past_valid || $past(!ARESETN))
begin
assert(!M_AXIS_TVALID);This check, however, assumes that you’ve set M_AXIS_TVALID to zero initially.
initial M_AXIS_TVALID = 1'b0;If you’d rather not use initial values, the check is easily modified to except the first clock cycle from the check.
always @(posedge ACLK)
if (!f_past_valid || $past(!ARESETN))
begin
if (f_past_valid)
assert(!M_AXIS_TVALID);In this case, the assertion is only checked on clock cycles following the
first one. Since the first clock cycle includes the reset, this guarantees
that M_AXIS_TVALID is clear on the second clock cycle and so we know
our property holds.
While AXI does not require an asynchronous reset, it does permit one. The check is easily modified to handle an environment with an asynchronous reset.
always @(posedge ACLK)
if (!ARESETN || $past(!ARESETN))
begin
assert(!M_AXIS_TVALID);Reading this out, it says that if the reset is ever active then M_AXIS_TVALID
should be clear. Likewise, if the reset was active on the last clock cycle,
then M_AXIS_TVALID should also be clear.
From this beginning, we can turn our attention to the handshake itself.
Here, the rule is simple: if the stream stalled on the last cycle,
then all of the values must remain the same on this cycle. That means that
M_AXIS_TVALID must remain true, and everything else must remain stable.
end else if ($past(M_AXIS_TVALID && !M_AXIS_TREADY))
begin
assert(M_AXIS_TVALID);
assert($stable(M_AXIS_TDATA));If you had more than just the M_AXIS_DATA connection, you’d also want to
assert these are stable as well.
//
// Assert the same for any other associated
// data that might be present: TLAST, TID,
// TDEST, TSTRB, TKEEP, TUSER, etc.
//
// Only asssert the signals you actually have in
// your interface.
assert($stable(M_AXIS_TLAST));
assert($stable(M_AXIS_TSTRB));
assert($stable(M_AXIS_TKEEP));
assert($stable(M_AXIS_TID));
assert($stable(M_AXIS_TDEST));
assert($stable(M_AXIS_TUSER));
endThere. That’s all that’s required of an AXI stream handshake.
Conclusion
Getting AXI handshaking right is a basic requirement of working with anything AXI related. The logic templates above should help anyone in that journey. As you can see from the examples, however, there are plenty of ways of getting this wrong.
A prudent man foreseeth the evil, and hideth himself: but the simple pass on, and are punished. Prov 22:3, 27:12